§ 01 · The Task
紙飛行機
Fold a paper airplane. One figure, every team.
Traditional kami hikōki — a classic 4–6 fold airplane curated by the Nippon Origami Association (日本折紙協会).
Target figure
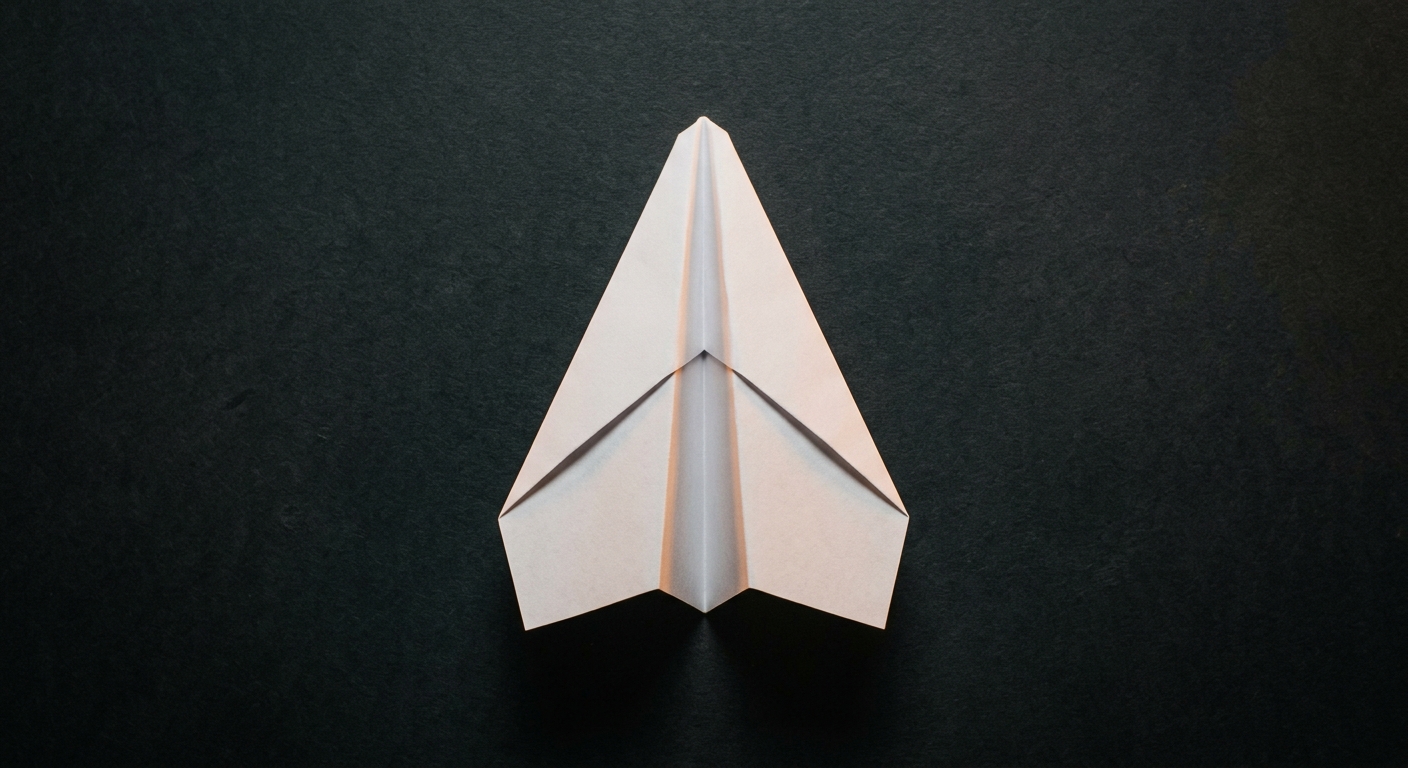
紙飛行機 · kami hikōki
The Paper Airplane
A traditional Japanese paper airplane — 4 to 6 folds depending on the variant chosen by the team. Judged on crease accuracy, structural fidelity, symmetry, and paper integrity.
Default paper
15 × 15 cm
Default weight
≥ 60 gsm
Folds
4 — 6
Scored on
Folding time
The Rules
Judged by an Origami Grand Master from the Nippon Origami Association. Their craft is the rubric.
Success / Failed
Pass or fail
The judge panel declares whether you folded a
recognizable airplane.
Time limit
10 min/attempt
Exceeding the limit is an automatic fail.
Judged by
Origami Grand Master
From the Nippon Origami Association (日本折紙協会).
Scoring criterion
Folding time
Faster successful folds rank higher.
And if the plane actually flies — extra points.



